图3-10 传感器融合解决建图定位问题
图3-11 传感器融合解决感知问题
图4-2 统计滤波器
图4-3 体素滤波器
图4-4 高斯滤波器
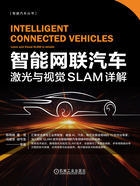
图4-17 提取的平面点和边缘点
图4-21 NSH数据集运行效果
图4-22 KITTI数据集运行效果
图4-25 LeGO-LOAM的运行效果
图4-28 LIO-SAM的运行效果
图6-16 针对单目SLAM的语义地图重建示例
图6-17 稠密三维CNN语义建图在NYUv2上测试的结果